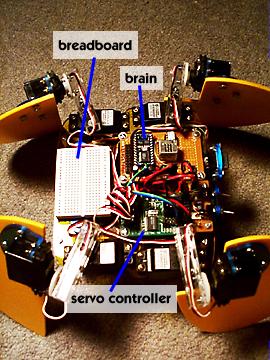
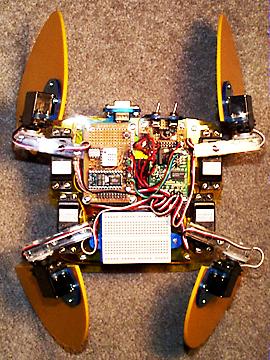
The breadboard there is an area for testing out sensors and circuits.
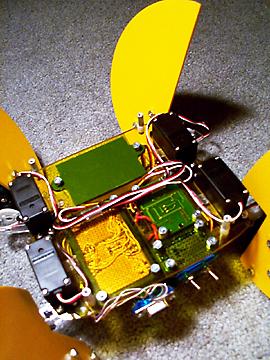
If you find yourself interested in this picture it's because your inner electronics teacher is getting a charge out of how neatly the servo wires have been secured.
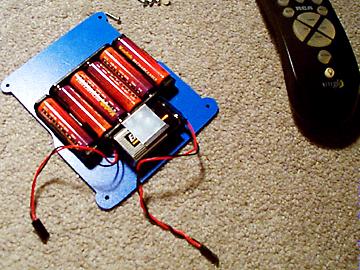
Also pictured is a plain old 9 volt battery, which powers the electronics. Fortunately, these won't draw much power.
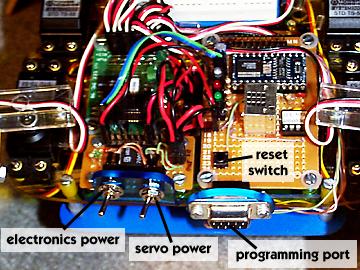
Without a doubt, it's a good idea put a reset button on a robot and make sure it's easy to get to.

Right now I'm having trouble getting it to go in a straight line (it drifts to the left.) I'm trying to figure out whether this is a software problem or a hardware problem.
Next up is turning, and then backing up. After I get these things worked out, it'll be time to start installing sensors so the thing can operate autonomously.
There is no good way to control the speed of the servos with the SSC II, which is essential to goal #3, and I may end up building and programming my own servo controllers.
To operate the robot on carpet, feet of some sort will need to be installed, because the legs just dig right into the pile and then drag.
As you can see, the robot only moves one leg at a time while using its other three legs as a tripod (designated by the red lines.) The pink dot is around where the center of gravity is. See the animation below.
This is the same gait used by the Sony Aibo and the Lynxmotion quadruped.
